HydroChrono: Quick Tour

HydroChrono (Hydrodynamics for Project Chrono) is a hydrodynamics simulation toolkit built on Project Chrono. It is designed for simulating wave energy converters (WECs) and other complex ocean systems, and is 100% free and open‑source end‑to‑end — no proprietary dependencies required.
It uses Boundary Element Method (BEM) hydrodynamic coefficients (e.g., from Capytaine) to model added mass, radiation damping, and wave excitation, and runs time‑domain simulations via the Cummins equation on Chrono multibody models. Results are exported to portable HDF5 for analysis and verification.
Quick start (CLI)
After downloading a release, open a terminal in the app folder and run:
run_hydrochrono.exe -h # help
run_hydrochrono.exe -i # info/banner
# Run a case by directory (auto-detects setup)
run_hydrochrono.exe .\cases\my_model\
# Or run directly from a setup file
run_hydrochrono.exe .\cases\my_model\my_model.setup.yaml
# Some useful options
run_hydrochrono.exe .\cases\my_model\ --nogui --quiet --log
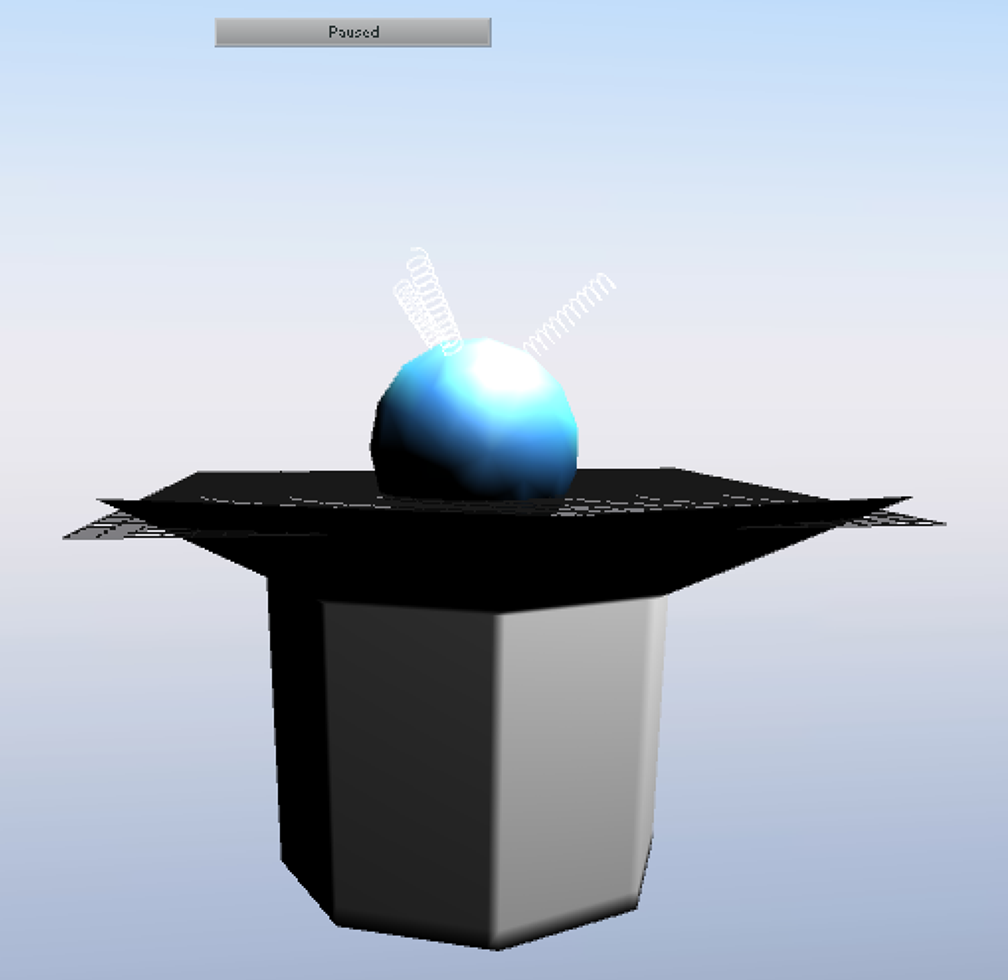
GUI Example
Use the GUI to visually inspect the assembled multibody system (bodies, joints, actuators) and verify that YAML inputs are wired correctly. Use the --nogui option to disable visualization straight from CLI, or change the settings in the *.simulation.yaml file.
YAML-based UI
Describe your system in text files that can be versioned and automated:
cases/my_model/
my_model.setup.yaml # references the files below (recommended)
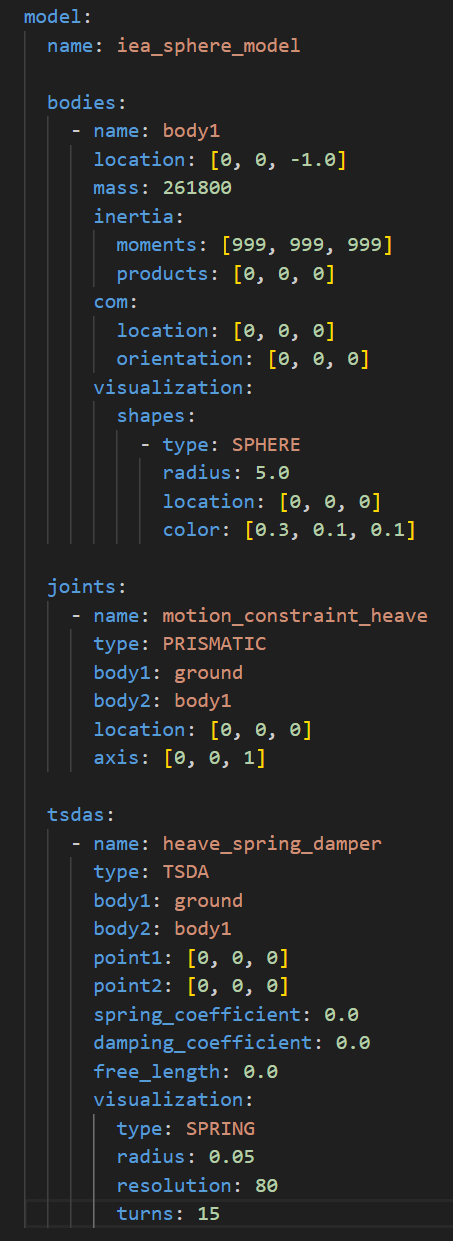
my_model.model.yaml # bodies, joints, actuators
my_model.simulation.yaml # time step, duration, GUI, waves
my_model.hydro.yaml # hydrodynamics
my_model.setup.yaml— orchestrates which inputs to runmy_model.model.yaml— Chrono multibody system (bodies, joints, constraints, actuators)my_model.simulation.yaml— time step, duration, output options, GUI flagsmy_model.hydro.yaml— BEMIO.h5path and hydrodynamics mapping/wave inputs
Run with either the folder path (auto‑detects *.setup.yaml) or the setup file directly:
run_hydrochrono.exe .\cases\my_model\
run_hydrochrono.exe .\cases\my_model\my_model.setup.yaml
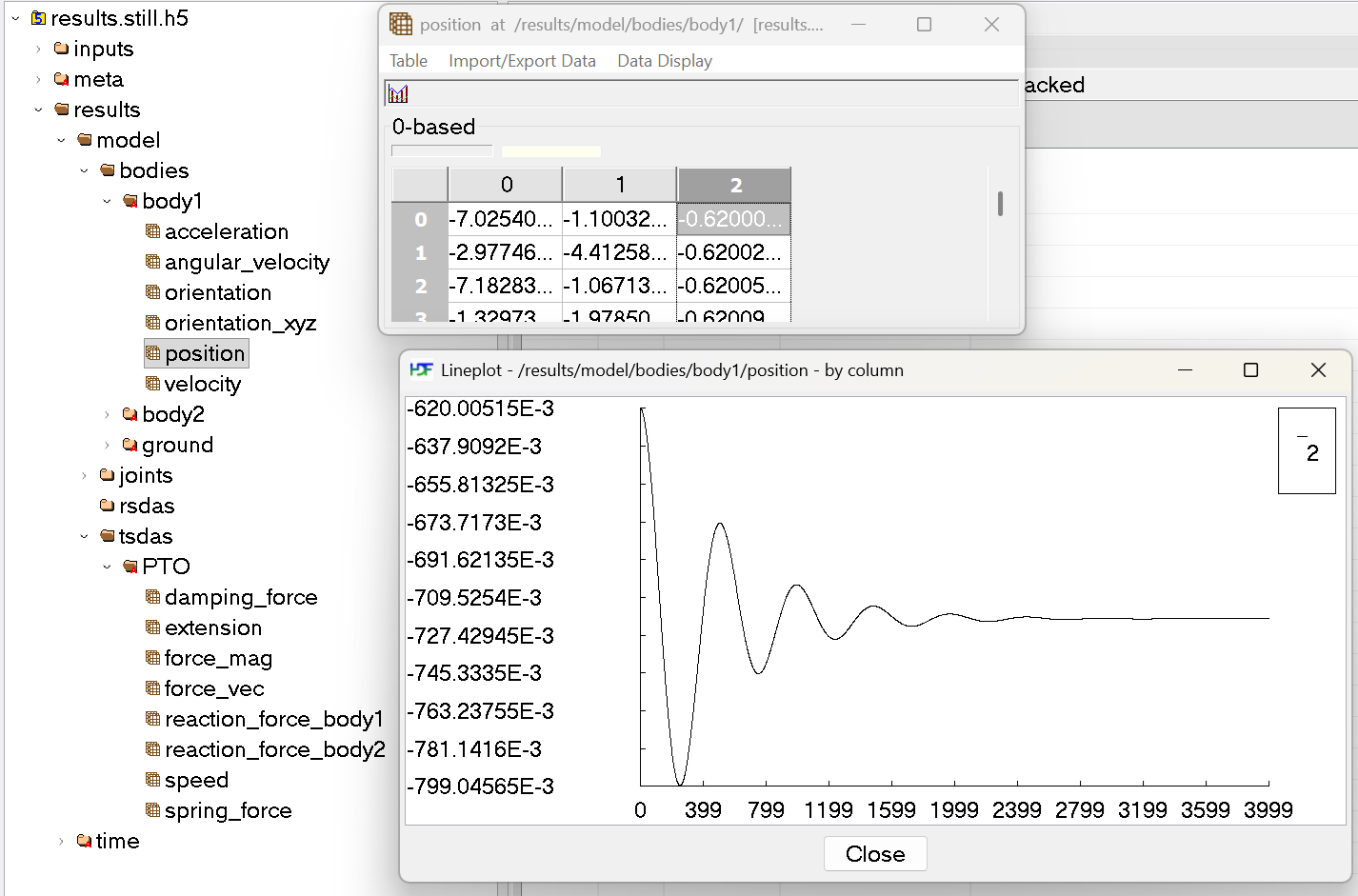
HDF5 outputs (portable)
Simulations produce a single .h5 file with time series and model results. Typical datasets include:
- Body position (XYZ):
/results/model/bodies/<body_name>/position - Body orientation (roll, pitch, yaw):
/results/model/bodies/<body_name>/orientation_xyz - Translational spring–dampers:
/results/model/tsdas/<actuator_name>/... - Rotational spring–dampers:
/results/model/rsdas/<actuator_name>/...
View and plot with HDFView or common Python tools.
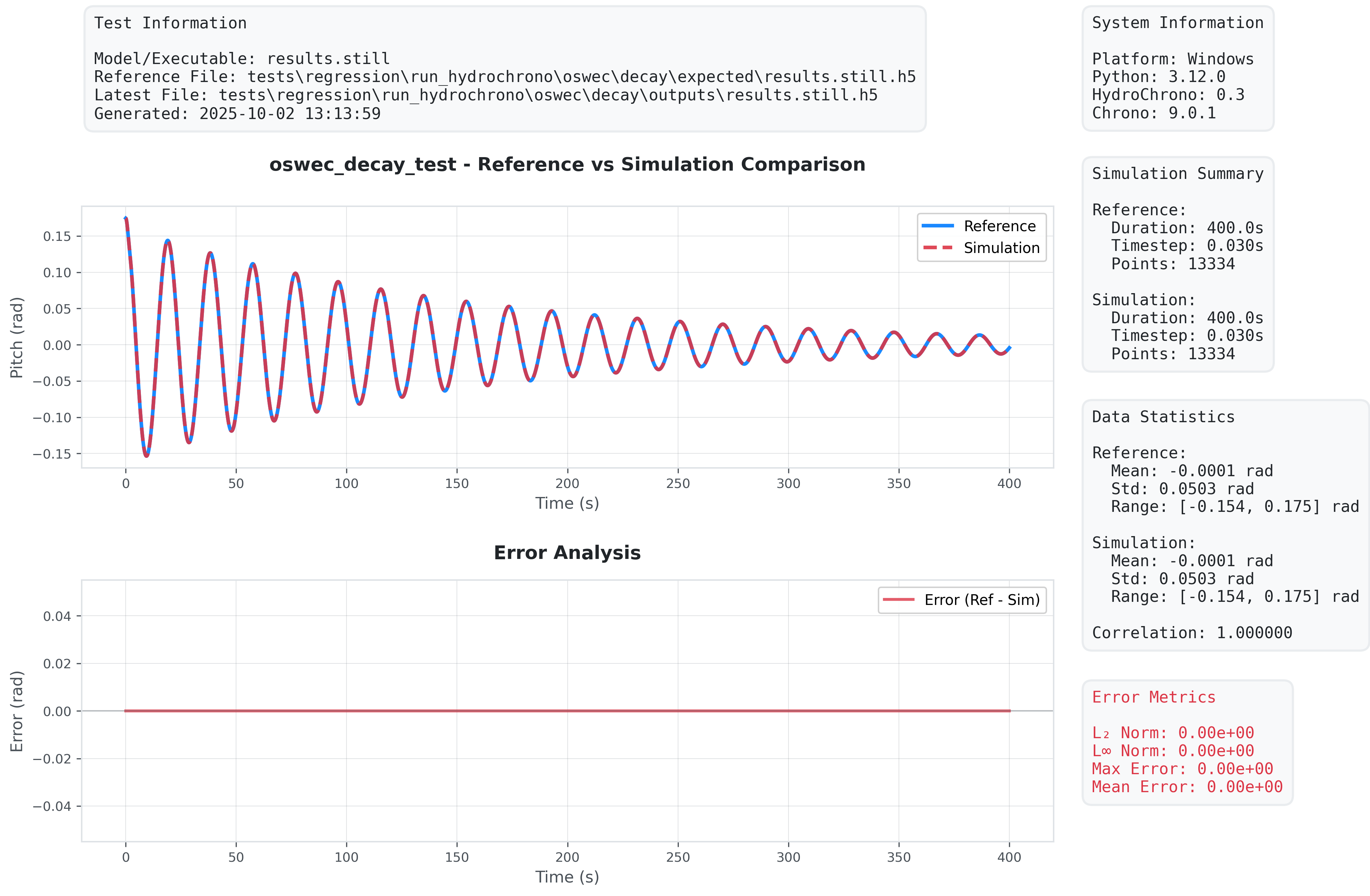
Verification snapshot
Comparison from the OSWEC decay test used in the regression suite.
Developers
Full build and contribution docs: Developer documentation
Papers
- Ogden, 2023 — HydroChrono background, theory, and implementation details: PDF
- Ogden, 2025 — Automated design exploration with meshing, Capytaine, and HydroChrono in the loop: PDF